|
Motion controller
General description
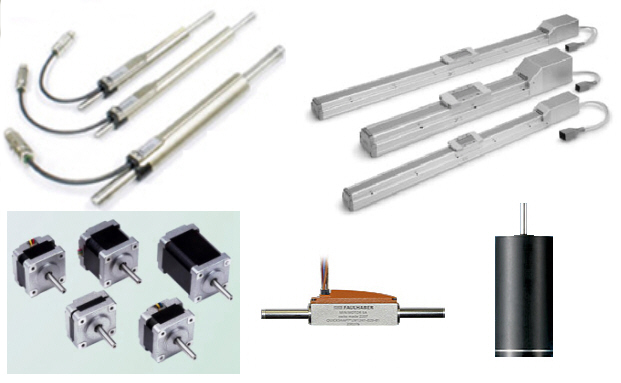
The M101 is designed to drive a lot of different types of motors:
- Linear motor 2 phases (like LinMot Motors)
- Linear motor 3 phases (like Faulhaber Linear DC Servomotors)
- Stepper motor 2 phases (Hybrid)
- Stepper motor 3 phases (Hybrid)
- DC motor
- BLDC motor 3 phases (brushless DC-Motor)
Features
| Power supply for electronic |
11.5 .. 12.5 |
V DC |
| Power supply for motor |
12 .. 48 (12 .. 72) |
V DC |
| Max. continuous output current |
7.0 pro Phase
|
A
|
| Max. peak output current |
9.0 (M102), 5.0 (M101) |
A |
| Total standby current |
190 |
mA |
| PWM switching frequency |
20 (with 40 kHz regulation) |
kHz |
Digital inputs
Signal level low
Signal level high
Current absorption max
Scanning rate |
6 inputs, programmable, 3.3..24V
0 .. 1.5
2 .. 24
20
40 |
V
V
mA
kHz |
Digital outputs
Max voltage
Current max
Scanning rate |
4 transistor outputs open collector
24
50
10 |
V
mA
kHz |
| Speed range for stepper motor |
0 .. 10000 |
full-step/s |
| Speed range for BLDC motor |
0 .. 60000 |
rpm |
| Speed range for DC motor |
0 .. 30000 |
rpm |
| Speed range for linear motor |
0 .. 5 |
m/s |
| Scanning rate |
10 |
kHz |
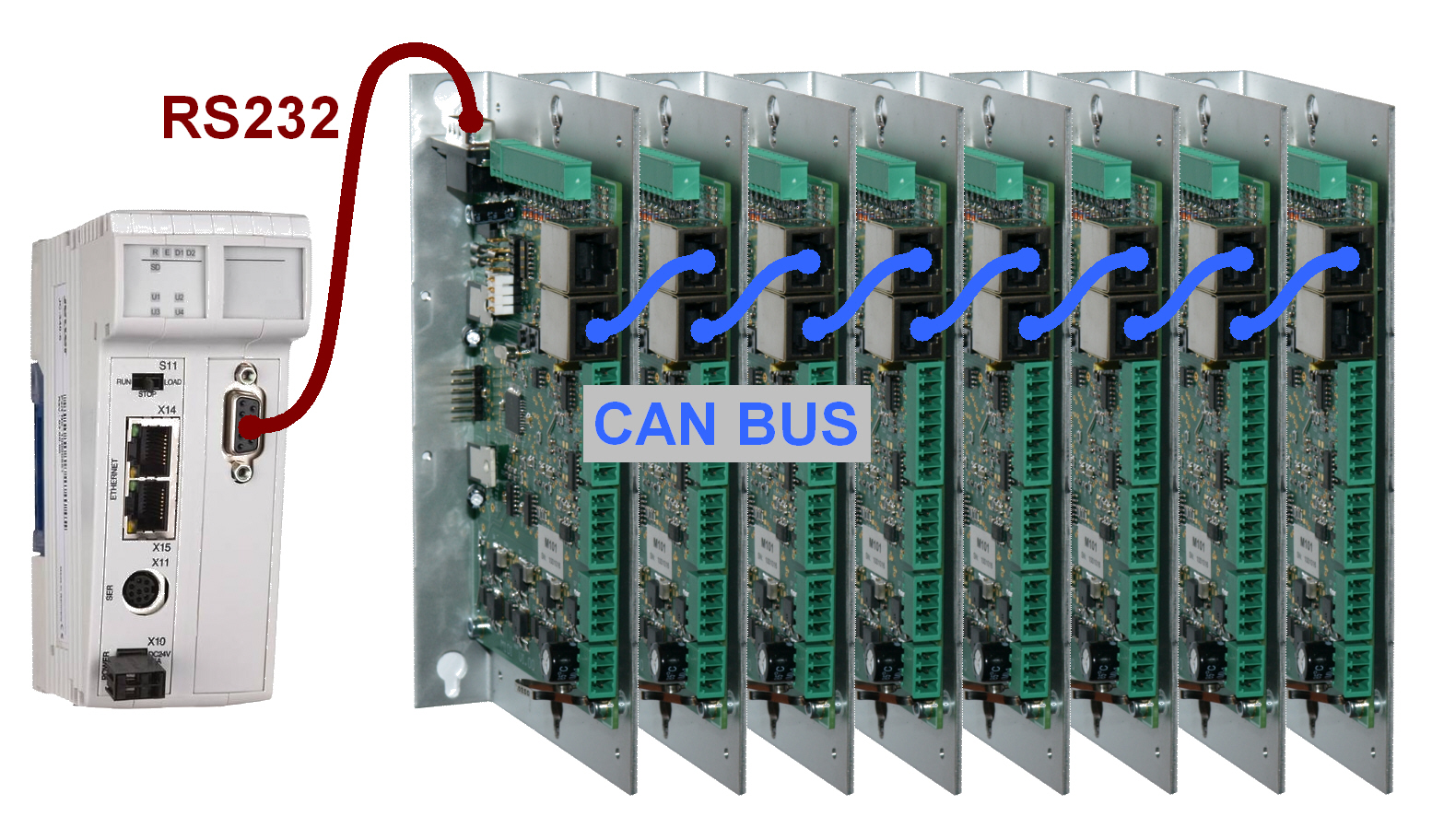
| RS232 Interface |
max 115.2, default 19.2 |
kBaud |
| CAN Interface (between more M101, M102) |
Max. 1000, default 125 |
kbit/s |
| Operating mode for stepper motor |
pure-sinusoidal current control technology for Stepper Motor |
|
| Operating mode |
positioning, homing, programmable, automatic idle-current reduction,
1 analog input 0..10V (adjustable) |
|
| Position monitoring |
yes, depending on encoder resolution |
|
| Protection circuit |
Over-voltage, under-voltage, Short-voltage, over-current, short-circuit |
|
| Current drop |
programmable and adjustable in 1% steps |
|
| Temperature range |
0 to 40 |
°C |
| Weight |
210 |
g |
| Dimension of print-support |
180 x 106 x 24 |
mm |
| External digital encoder RS422 |
max frequency 500 |
kHz |
| Encoder resolution with hall sensors for 3-phases Linear motor and BLDC |
3072 |
Inc/Tm |
| Encoder resolution with hall sensors for 2-phases Linear motor |
2047 |
Inc/Tm |
| Resolution with external digital encoder |
max: 65535 |
Inc./Tm |
Linear Motor
Ultra low speed and high positioning resolution (1/3072 pole pitch) are thus possible. A supplementary external high resolution encoder increases the performances.
Stepper Motor
The M101 is a high performance microstepping drive based on pure-sinusoidal current control technology developed by SwissELME. The driven motors can run with smaller noise, lower heating, smoother movement and have better performances at higher speed than most of the drives in the markets. It is suitable for driving 2-phase and 3-phase hybrid stepping motors.
Ultra low speed and very high positioning resolution (1/1024 of step) are thus possible, without creating vibration due to the resonance frequency of the motor. An external encoder allows to monitor the step lost. The optimized movement algorithm reduces a lot of vibration, especially at low speeds, and at the same time is possible to make fast movements (>10000 step/s).
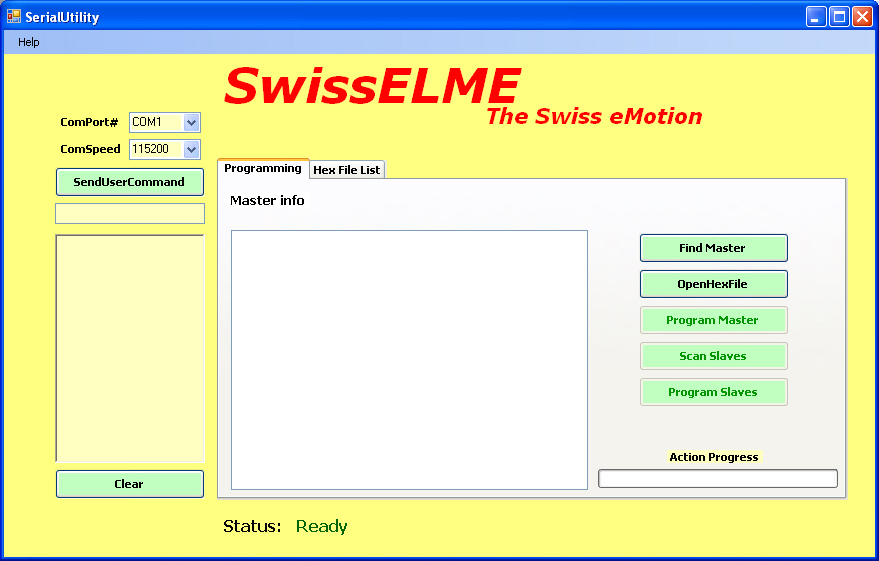
Optimized performances
Setting rump-up and rump-down acceleration value, and maximal speed value, it is possible to modify the movement profile on the fly. Positioning with high resolution, including limit switches and zero referencing.
New HW technology
Power MOSFETs with minimal Rdson (on-resistance) allows high current without need of a supplementary heat sink.
High performance DSP controller.
Operational manual:

M101_OM.pdf |